No there is no coil binding in any of these applications.
I will assemble a OE Ford strut with my ST front spring tomorrow. I can remove the dust boot for proper static measurements. I reckon I can also measure some stock front springs. I think I still have the ones from my car.
My numbers are based on hooking a tape measure on the upper spring perch/bearing and measuring down to the perch. I did that to determine how long to build my damper inserts. The body is borderline too short, but they were some tubes I had left over from another project. I was concerned i wouldn't have enough droop travel, but so far so good.
I measured a stock ST today with 16in wheels and that car from the top of the front whel well to the ground was only about .250ish higher than mine with a driver.
The spring rate of the bumpstops was measured in lbs of force. My spring smasher is a simple linear actuator at the bottom and a load cell at the top. There is a string pot to measure linear travel. I can see the foam "soften" in rate as I pause to make the force measurement.
https://www.ppmracingproducts.com/product/boydbilt-spring-smasher/
If I can get some time tomorrow I will pull the dust boot off the rear damper and see what kind of bump travel I have and put an indicator on the shaft to see how travel works out. I would like to take the rear springs off and put the softer rear springs on the car. Tracking says my front springs should be here Tues, so I will be able to tell you what I have used for bump travel over the last month of street driving.
Alright, since we're doing science here, it's time to take off the gloves and Science the crap out of this. Some of this will be obvious or you've heard it before, some stuff won't be.
The purpose of a car suspension is to handle disturbances in the road. For OEMs, comfort is often the primary concern, with handling a close second. For non-aero performance and racing applications, the primary concern is keeping the rubber in contact with the road to maximize grip. There are other considerations like body roll, controlling weight transfer and turn-in. On racecars with moderate ground effect aero (splitters and diffusers) that produce a car with total net negative lift (not just a wing or lip like most sports cars that provides a little downforce for stability but often still have positive total lift) the concern that overrides optimum mechanical grip especially in the front is maintaining ride height on the track so the downforce is consistent, since this more than makes up for a stiffer than optimum road following or "mechanical grip". (That's all that needs to be said about aero right now)
The "figure of merit" that corresponds to these goals, regardless of car size and corner weight, spring and damper placements ("install ratio" and "motion ratio") is the natural frequency of the spring/mass/damping of the spring, the car body and the shock absorber. It turns out there are some ranges that have been worked out empirically over for as long as there have been automotive dampers for these that work pretty well for any car. This is basically how people who design suspension for both passenger cars and all out race teams decide what a good starting point is, without going into tuning blindly and hoping something works.
Passenger cars: 1.0Hz (comfort)
Sports cars: 1.25-1.75Hz (compromise)
Gravel Rally: 1.5-2.0Hz (max grip on rough surfaces)
Track/Race Cars 2.0-2.5Hz (max grip on "smooth" surfaces, which are not actually smooth)
Aero race cars: 2.5Hz+
We can calculate natural frequency if we know the following:
1) Corner Weight
2) Unsprung Weight
3) Spring Rate
4) Install/ratio (where the spring/strut/shock is mounted relative to the wheel as the length from the control arm pivot to the contact patch of the tire)
If we take corner weight less unsprung weight, we have our "Mass". Spring rate is obvious and our shock/strut is the damper. To get motion ratio (basically how the wheel and body accelerate relative to eachother, we take the install ratio squared apply it to our spring rate to get our effective "wheel rate". Dampers I will go into later once we've picked a spring.
Natural frequency is a simple equation (as long as you convert to kg, newtons and meters)
f = 1/2*pi * sqrt(k/m)
I'll spare you the huge spreadsheet for now on how to actually get there and work out a bunch of other stuff, but there's one thing I should mention
If the front suspension frequency is higher than the rear, the front will recover faster than the rear, which causes the car to "Pitch" forward and back, which is bad because it loads and unloads the axles unevenly and is downright uncomfortable.
If the rear suspension frequency is slightly higher than the front, when you go over a bump/dip, the rear will recover faster tp catch up to the front and the car will "heave" up and down. We want this because it means better control over weight transfer and cornering stability. Also ride comfort. This is referred to as "Flat Ride". Ideally, we want somewhere between 10-30% higher in the rear. Where in that range basically determines the speed range at which the car will be most stable without pitching.
Now, as it turns out, for maximizing mechanical grip, its best to design for near 2.0Hz in the front, and not exceed 2.5 Hz in the rear. This is another empirical number, but it's generally derived from the mass ranges applicable to cars, and the scale of imperfections in a typical asphalt or concrete surface, with the goal of minimizing load variation on the tire.
The stock weight FiST turns out to have frequencies of 1.4F/1.7R for early models and about 1.3F/1.6R for the later models after 2016. Comfortable and a bit sporty. But OEM car manufacturers have a trick these days for sporty car models, which is to increase significantly the shock low rebound closer to or exceeding "critical" damping, which is point where when going over little bumps in the road surface, the restoring force from the spring is not enough to return to center, which tucks up the wheels and makes the car body go down on it's suspension, and on to its modern MCU (multicellular urethane), which being designed to look like christmas trees, possess a very approximately linear spring rate for the first portion of travel. This "spring aid" is used to stiffen the suspension in a corner to improve tire grip. Now my bumpstop calculations might be off, but including these spring aids, frequencies rise to in the range 1.8F/2.2R, for better grip. This is how they maintain ride comfort (on the main spring), and still provide (cheaply) higher performance. Most lowering springs for the FiST are not that much stiffer than the OEM springs, for this reason!
But this approach has drawbacks, specifically the progressive dead-zone of the soft springs, and the excessive high speed rebound damping that results from increasing low-speed damping. Which makes the ride feel stiff and "sporty" which is actually a euphemism for "rides poorly because racecar"
However, if we use something like a Bilstein damper, which as shown by @FusionWorks has less total damping than the OEM, and also more symmetrical compression/rebound, we are no longer jacking down on the stops, and while ride improves, the springs are now not stiff enough on their own and we might want to upgrade.
To get the FiST into the 1.8-2.0Hz range in the front, it turns out we need about 250-350lb/in springs. In the rear, 225-300lb/in will give us a flat ride in the range 2.1-2.4Hz. The Bilstein B14 kit is at the lower end of this range, as are a number of "street" oriented coilovers. Great. Avoid the Ford Racing
Now that we've chosen our springs, we have a different problem, which is that a setup that is optimized for grip might have a bit more body roll than we want (especially with poor geometry struts up front) and also we want to adjust oversteer/understeer behavior. The component we can add that will do this for us, without affecting the main spring rate, is the sway or anti-roll bar. We can then pick out bars that will do that for us, and we can through some different calculations for front and rear roll stiffnesses and lateral load transfer that can get us in the ballpark we want. Not going into that right now though
Now, the purpose of the shock or damper is to a) control the car body from oscillating at its natural frequency every time it goes over a bump, and b) control the unsprung wheel from oscillating and losing contact with the road or transferring too much force to the car body. This is its primary function. Low speed damping controls body oscillation and high speed controls wheel oscillation, We can also dial up the low speed rebound damping a bit if we want smoother transitions, but this feature is often horribly overused and produces a far more terrible ride quality, which if overdone is actually also bad for our grip and keeping the tire in contact with the ground with consistent behavior. Because things go up, and also come back down, what we actually want to do is stiffen our anti-roll bar and possibly increase both rebound and compression together to keep our damping more even.
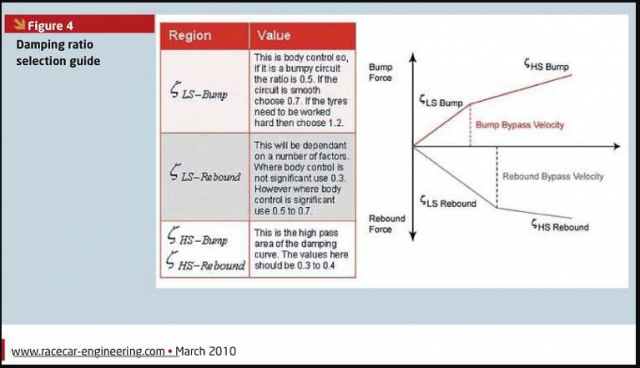
Another suspension factor that comes from many decades of empirical testing, is that for a typical digressive damper, the (mostly symmetrical) low speed damping that we want is between 50% and 70% times the critical damping rate (basically the slope of the line on the shock dyno), and our high speed damping between 30% and 40% times critical (lower for bumpier roads, higher for smoother tracks). These are basically just high enough to reduce most of the oscillation of the car body and the unsprung wheel where you start getting diminishing returns. Ideally at really high damper speeds, we'd want to reduce damping force to absorb kerbs and rough bumps without transferring as much force to the car body, but that option is usually not available until you get into really high end stuff (Penske/Ohlins), which also have the drawback of needing frequent maintenance and rebuilds to function properly. Lastly, we want to keep up low speed damping long enough to prevent coupling vibration/oscillation between the wheel and car body (instead of between the wheel and ground and the car and ground separately. Bilsteins typically use 3 in/s as the digressive "knee". But general rule of thumb in engineering is that anything above sqrt(2)*natural frequency will avoid couping behavior. If you get really fancy, you can actually calculate both that damper speed, and maximum displacement of our body oscillations since we know our corner mass and wheel rates, and move the knee where we want it, but at least initially, lets work without it.
critical damping = 2*sqrt(mass*wheel rate)
Critical damping rate is defined as the maximum damping of an oscillating system that will still return to This gives us a damping rate in lb/(in/s) or N/(m/s).
For our 350 lb/in front springs above, the critical damping rate comes out to 56 lb per in/s, and for 300 lb/in rear, because of the aft position of the rear damper, critical damping is 26.5 lb per in/s. This means at 3 in/sec (the typical Bilstein knee), anything over 168 lbs of rebound damping force in the front or 80 lbs in the rear will cause the car not return to center on repeated disturbances. These don't even need to be true bumps or "kerbs" any subtle variations in road surface on a smooth track combined with driver inputs that excite oscillation near the natural frequency will cause this behavior, and will heavily jack the car down until it hits the bumpstops which will increasing the spring rate until the system is no longer critically damped. Alternately, compression damping over this value will jack the car up as it goes over the road surface. If both compression and rebound are higher than this, the car will simply be all over the place.
For a 2014-2016 stock main spring (171F/143R), these values are about 39 and 18 lb per in/s, corresponding to 117lb and 54 lb. As you can see from the shock dyno plot that
@Fusion Works posted in
Post #14 of this thread, the OEM digressive damper (not sure which year) produces about 100lbs compression and 150lbs of rebound at 3 in/sec. This is a classic "jack down" setup, which especially in cornering, will pull the car on to the initial section of its pseudo-linear bumpstops, at which point the spring rate and frequency increase, and the system is no longer critically damped. It produces semi-decent handling, and also produces a terrible (aka "factory sport tuned") ride quality, which sells like hotcakes (because sports-car). For a 2017-2019 car, the critical values are even lower.
For a 250 lb/in front spring, critical damping is 47 lb per in/s, or 141 lb at the knee. If your car is lighter than stock, this value will be a little lower.
Now, as it turns out, anything that goes up must come down, and so to maintain road contact at the ideal natural frequency, we actually want nearly symmetric damping in the 0.5-0.7 range. Here is an example plot from one of many shock tuning guides:
There's this persistent myth in the aftermarket that the way to make a car handle well, we need a metric shitton of rebound damping and less compression damping. This is unfortunately one of those things that sticks around. It has its basis in design for much more softly sprung passenger cars and trucks with very soft, often linear compression at 5-20% of critical. To keep such a comfort based setup in contact with the road, you do need an excess in low speed rebound 60-80% critical, or between 3x and 8x times compression damping, just to keep the suspension from being underdamped and oscillating uncontrollably. Obviously more is better right and we should just turn the knob to 11 and keep the same ratios.
It turns out this is not true. As we increase compression damping to improve body control to the levels you want for a performance setup, we actually want to *reduce* rebound damping, or else we will actually reduce grip by increasing load variation on the tires as the car body gets closer to critical damping
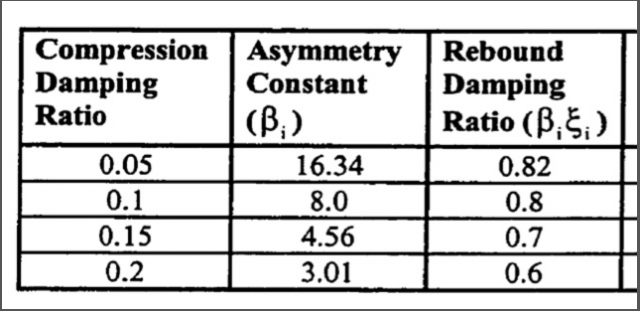
Here's a near post that talks about it and a table pulled from a paper it references which is actually referring to over the road trucks, and limit load variation to reduce damage to roads. But it turns out that to optimize grip, we actually want the same sort of thing (consistent tire loads), but with better body control. It is fairly simple to extrapolate the results until you reach the graph and 0.5-0.7 values above.
https://edfishjr.com/2020/12/27/basics-of-shock-tuning-2/
So there are basically only a few situations in which you actually want to dial up for high amounts of assymetrical rebound damping nearing or exceeding critical levels.
1) You are tuning an OEM car or truck with comfortable springs and light compression damping
2) You are tuning a "jack down" setup with either progressive springs or MCU bumpstop "spring aids". This is common in autocross and stock classes where you are allowed to change shocks, but are restricted to stock or otherwise limited spring stiffnesses.
3) In autocross, drift, tarmac rally and/or gymkhana setups, where you need to emphasize quick transitions or you don't need to maximize "grip" because you are sliding tires and chassis control is the overriding priority. Sometimes in wheel-to-wheel racing, you might also want to give up a little grip to improve body control as well.
For any street performance, track or racing application, you're better off going for a more stiffly sprung setup to reach the 1.8-2.5Hz range (not exceeding 2.5 Hz), and increasing compression damping along with rebound, but staying below critical damping rates. If you want more body control, add stiffer sway bars to adjust chassis balance. Tuning in little bit of extra damping is okay, but don't go overboard. You'll end up with a setup that gives better traction *and* better ride quality than a heavy rebound biased design.
A jack-down setup with heavy rebound is still a legitimate way to tune a car, especially for autocross, as long as you're aware of the downsides and know that you're doing so intentionally
All that said, these are all just mathematical models of a slightly more complicated system, but we can generally use this as at least a good starting point for further tuning to match driver preferences on how the car should handle.






![[:(]](/images/smilies/frown.png "Frown [:(]")